

Katse temperatuuri mõõtmiseks temperatuurianduri abil.
Saadud tulemused kirjutame iga sekundi tagant Serial Monitori.
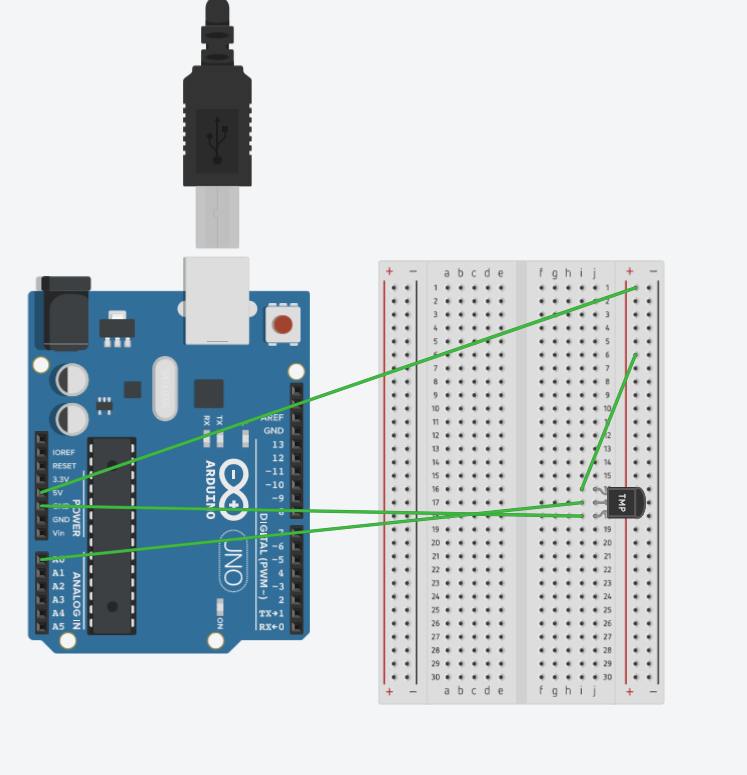
const int temperaturePin = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
float voltage, degreesC, degreesF;
// kasutame analogRead(), mis tagastab sisendi väärtused vahemikul 0 ... 1023.
// koostasime getVoltage() funktsioon, mis tagastab pingeväärtus 0 ... 5,
voltage = getVoltage(temperaturePin);
degreesC = (voltage - 0.5) * 100.0;
// degreesC = voltage * 100.0;
degreesF = degreesC * (9.0/5.0) + 32.0;
Serial.print("voltage: ");
Serial.print(voltage);
Serial.print(" deg C: ");
Serial.print(degreesC);
Serial.print(" deg F: ");
Serial.println(degreesF);
//Ekraanil ilmub järgmine tekst: "voltage: 0.73 deg C: 22.75 deg F: 72.96"
delay(1000); // ootame 1 sek
}
float getVoltage(int pin)
{
return (analogRead(pin) * 0.004882814);
// teisendame pinge vahemikust 0,0 ... 5,0 V, vahemikku 0 до 1023.
}
4.2. Katse Servo kasutamine

// Paljud saadaolevad teegid (library’d) on leitavad aadressilt http://arduino.cc/en/Reference/Libraries
#include <Servo.h> // teavitame Arduino IDE-d, et kasutame mootorite juhtimiseks mõeldud Servo.h teeki
// Kui teek on lisatud, saame kohe kasutada selle funktsioone.
// Servo teegi funktsioonide nimekirja leiad: http://arduino.cc/en/Reference/Servo
// Enamik teeke on kättesaadavad menüüst "File / Examples".
Servo mootor; // Loome objekti nimega "mootor", millega juhime pöördemootorit (servomootorit)
void setup()
{
// Seome mootori juhtimise digitaalse pinni 9 külge.
// Kui kasutad rohkem kui ühte mootorit, peab iga uus mootor olema seotud eraldi digitaalse pordiga.
mootor.attach(9); // Ühendame mootori juhtimise digitaalpordi 9 külge. See peab olema PWM-toega väljund.
}
void loop()
{
int asend;
mootor.write(90); // Pöörame mootori asendisse 90 kraadi
delay(1000);
mootor.write(180); // Pöörame mootori 180 kraadi
delay(1000);
mootor.write(0); // Pöörame mootori tagasi 0 kraadi
delay(1000);
// Mootori pööramine aeglaselt päripäeva (0 → 180 kraadi)
for(asend = 0; asend < 180; asend += 2)
{
mootor.write(asend); // Muudame mootori asendit
delay(20); // Lühike paus sujuvaks liikumiseks
}
// Mootori pööramine aeglaselt vastupäeva (180 → 0 kraadi)
for(asend = 180; asend >= 0; asend -= 1)
{
mootor.write(asend); // Muudame mootori asendit
delay(20); // Lühike paus sujuvaks liikumiseks
}
}
Ülesanne 4 Temperatuuritundlik servolülitus(Kasvuhoone temperatuuri reguleegimine)
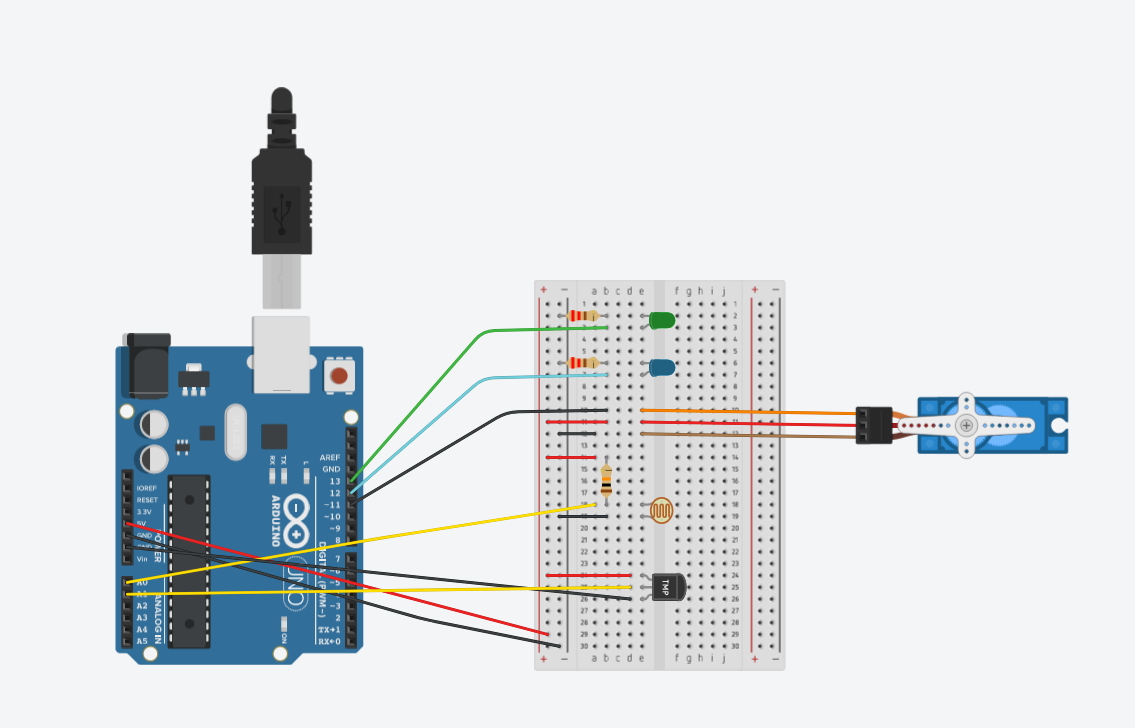
Komponendid:
1x Arduino UNO
15x Juhtmed
2x LED lamp
2x 220 Oom Takisti
1x 10K Oom Resistor
1x Photoresistor
Temperetauur sensor
ServoMotor